三次元の X,Y,Z座標に平行移動行列や回転行列を適用した後の座標を得るには
どうすれば良いでしょう?
平行移動ならば単純にそれぞれのベクトルの和で済みます。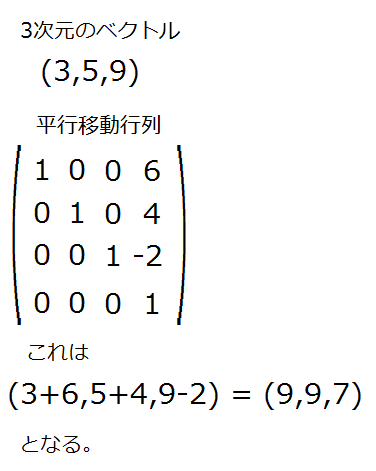
ですが回転行列となると乗算が必要になり、色々とややこしくなります。
そこで登場するのが同次座標系です。
これは X,Y,Zに1次元増やして X,Y,Z,Wにして、Wを1にしたものです。
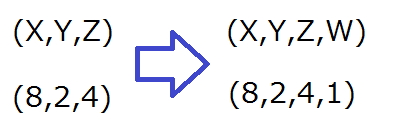
普通の座標系ではX/W,Y/W,Z/Wとなる点を表します。
こうする事でどんなメリットがあるのでしょうか?
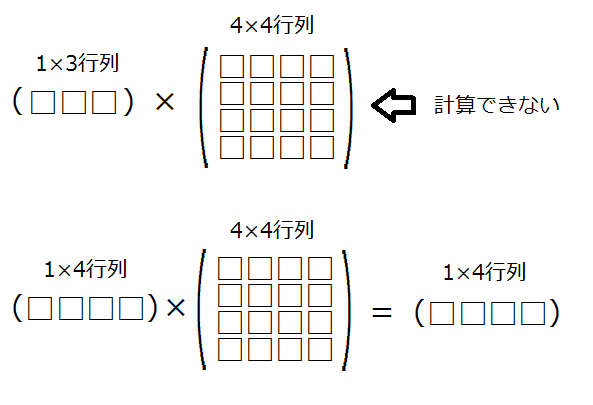
行列の計算方法を思い出して下さい。
3次元のベクトルでは1×3行列となり4×4行列とは計算する事すらできません。
ところが4次元のベクトルになると1×4行列となり4×4行列と積の計算をする事が可能になります。
そして、良くできた事に平行移動や回転、拡大縮小等の行列、あるいは合成行列であっても積、
つまり乗算で全て計算できるようになります。
